بهبود نحوه تعامل روباتها
 16 فروردین 1401 · · خواندن 4 دقیقه
16 فروردین 1401 · · خواندن 4 دقیقه برای تعامل موثر با انسان ها در محیط های اجتماعی شلوغ، مانند مراکز خرید، بیمارستان ها، و سایر فضاهای عمومی، روبات ها باید بتوانند به طور فعال در تعاملات گروهی و انفرادی شرکت کنند. با این حال، مشخص شده است که بیشتر رباتهای موجود هنگام برقراری ارتباط با کاربران فردی بسیار بهتر از گروههایی از انسانهای مکالمهکننده عمل میکنند.
هومن هدایتی و دانیل سفیر، دو محقق در دانشگاه کارولینای شمالی در چپل هیل، اخیراً یک تکنیک جدید مبتنی بر داده را توسعه دادهاند که میتواند نحوه ارتباط روباتها با گروههایی از انسانها را بهبود بخشد. این روش که در مقاله ای ارائه شده در کنفرانس بین المللی ACM/IEEE 2022 در مورد تعامل انسان و ربات (HRI '22) ارائه شده است، به روبات ها اجازه می دهد تا موقعیت انسان ها را در گروه های مکالمه پیش بینی کنند، به طوری که آنها به اشتباه یک شخص را نادیده نگیرند. سنسورها به طور کامل یا جزئی مسدود شده اند.
هومن هدایتی، یکی از محققانی که این مطالعه را انجام داده است، به TechXplore گفت: «حضور در یک گروه مکالمه برای انسان آسان است اما برای روباتها چالش برانگیز است. "تصور کنید که با گروهی از دوستانتان صحبت می کنید، و هر وقت یکی از دوستان شما پلک می زند، صحبت نمی کند و می پرسد که آیا شما هنوز آنجا هستید یا نه.
یکی از دلایلی که باعث میشود بسیاری از روباتها گاهی اوقات هنگام شرکت در یک مکالمه گروهی بد رفتار کنند، این است که اقدامات آنها به شدت به دادههای جمعآوریشده توسط حسگرهایشان (یعنی دوربینها، حسگرهای عمق و غیره) متکی است. با این حال، سنسورها مستعد خطا هستند و گاهی اوقات می توانند با حرکات ناگهانی و موانع در محیط اطراف ربات مانع شوند.
هدایتی توضیح داد: اگر دوربین ربات برای یک ثانیه با مانعی پوشانده شود، مشابه زمانی که افراد پلک می زنند، ممکن است ربات آن فرد را نبیند و در نتیجه کاربر را نادیده بگیرد.
"بر اساس تجربه من، کاربران این رفتارهای نادرست را آزاردهنده می دانند. هدف کلیدی پروژه اخیر ما کمک به روبات ها برای شناسایی و پیش بینی موقعیت یک فرد ناشناخته در گروه گفتگو بود."
هدایتی و سفیر برای پیش بینی موقعیت افراد در یک گروه مکالمه ابتدا الگوریتمی را توسعه دادند که باورهای یک روبات را در مورد اینکه چه کسی بخشی از گروه است و چه کسی نیست بررسی می کند. این الگوریتم می تواند خطاهای ربات را تشخیص دهد (یعنی اگر وجود یک یا چند نفر در یک گروه مکالمه را نادیده بگیرد). پس از آن، موقعیت کاربر/کاربران شناسایی نشده را با تجزیه و تحلیل داده های موجود پیش بینی می کند.
هدایتی توضیح داد: رویکرد ما بر اساس یکی از مشاهدات گذشته است. "به طور خاص، در حالی که ما "مجموعه داده Babble" (یک مجموعه داده گروه های گفتگوی انسان و انسان) را تمیز می کردیم، متوجه شدیم که افراد تمایل دارند در موقعیت های از پیش تعریف شده نسبت به یکدیگر باقی بمانند. این بدان معناست که اگر موقعیت همه افراد در یک مکالمه را بدانیم. به جز یک گروه، میتوانیم موقعیت او را پیشبینی کنیم.»
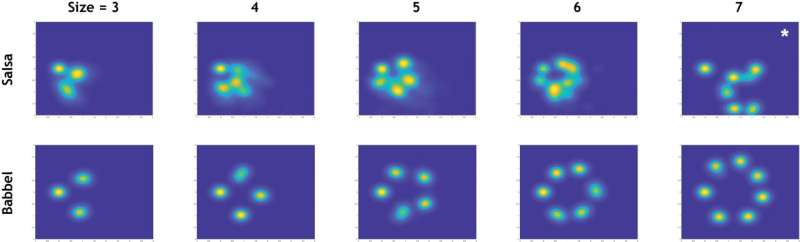
تکنیک توسعهیافته توسط هدایتی و سفیر بر روی مجموعهای از مجموعه دادههای موجود آموزش داده شد که شامل فیلمهای حاشیهنویسی از گروههایی از کاربران انسانی است که با یکدیگر گفتگو میکنند. با تجزیه و تحلیل موقعیت سایر سخنرانان در یک گروه، می توان موقعیت یک کاربر شناسایی نشده را به دقت پیش بینی کرد.
هدایتی گفت: ما نشان دادیم که میتوانیم رفتارهای انسانی را برای رباتها الگوبرداری کنیم تا آنها درک بهتری از پویایی گروههای گفتگو داشته باشند.
در آینده، رویکرد جدید معرفیشده توسط این تیم از محققان میتواند به افزایش تواناییهای مکالمه روباتهای موجود و جدید کمک کند. این ممکن است به نوبه خود اجرای آنها را در فضاهای عمومی بزرگ ، از جمله مراکز خرید، بیمارستان ها و بیمارستان ها آسان تر کند.
ما به بهبود گروههای مکالمه انسان و ربات اختصاص دادهایم و مشکلات باز و جالب زیادی در این زمینه وجود دارد (مثلاً نحوه تشخیص اینکه چه کسی سخنران فعال است، رباتها کجا باید در یک گروه قرار گیرند، چگونه به یک گروه ملحق میشوند و غیره). هدایتی افزود. "گام بعدی برای ما بهبود رفتار نگاه روباتها در یک گروه مکالمه خواهد بود. مردم رباتهایی با رفتار نگاه بهتر را باهوشتر میدانند (به عنوان مثال، روباتهایی که میدانند چه کسی صحبت میکند و به او نگاه میکند). رفتار نگاه روباتها را بهبود میبخشد و گروه گفتگوی انسان و ربات را برای انسان لذتبخشتر میکند."
منبع
https://techxplore.com/news/2022-04-approach-robots-interact-conversational-groups.html